





| 整体参数 | |
| 输入电压 | 14.8V~25.2V |
| 动态电流 | 1250~1650mA @ 16V |
| 功率 | 平均功率20W, 峰值功率 26.4W |
| 视频输出 | 以太网:IP (RTSP/UDP 720p/1080p@25fps H264/H265) |
| 控制方式 | S.BUS或串口TTL二选一 (默认TTL) / 网络TCP / 网络UDP |
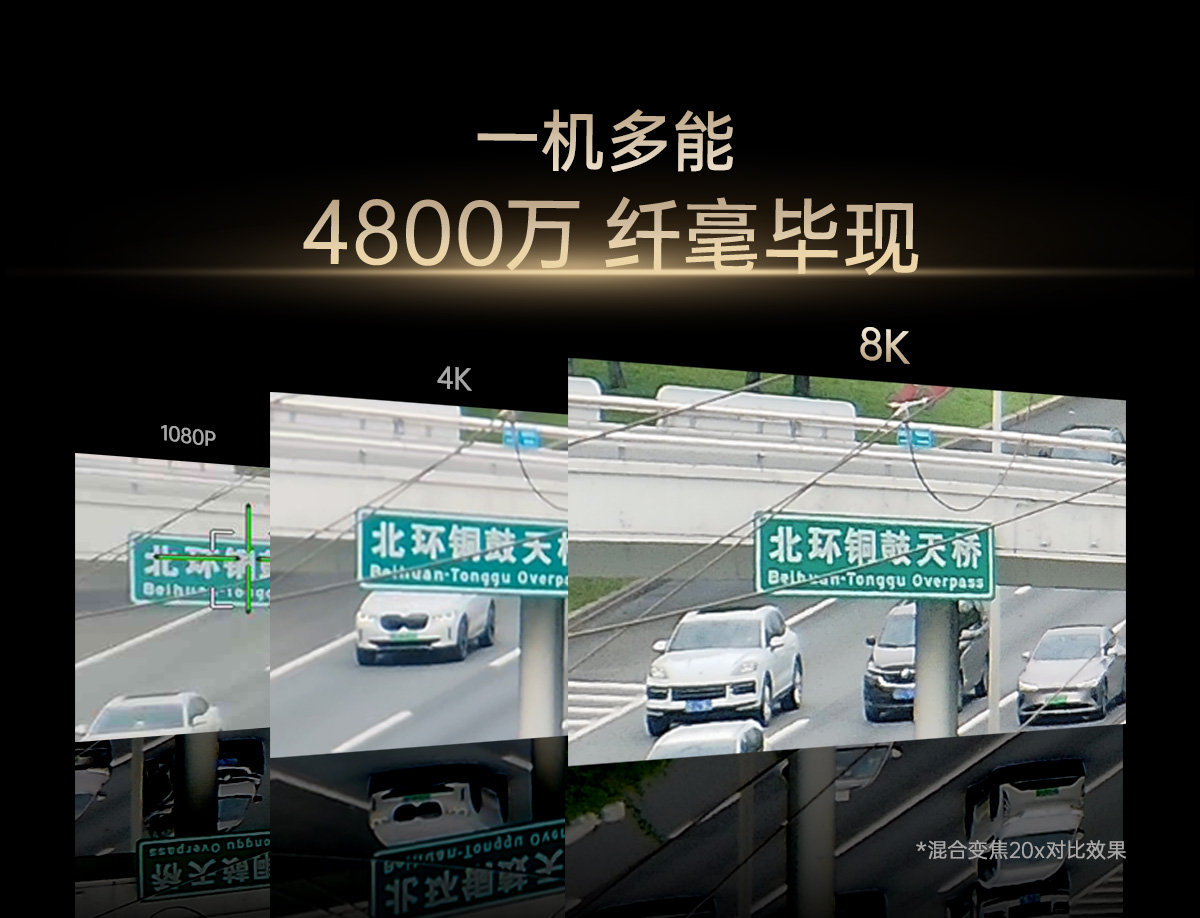
| 可见光相机变焦 | 10x组合混合光学变焦,160x组合混合光学数码变焦 |
| 防护等级 | IP4X |
| 工作环境温度 | -20℃ ~ +50℃ |
| 存储 | 顶部插槽TF卡1 (存储容量256G以内,读写速度 class 10以上) |
| 相机插槽TF卡2 (存储容量512G以内,读写速度 A2 V30) | |
| TF卡中的图片存储格式 | 顶部插槽TF卡1:可见光1920*1080 热像640*512 |
| 相机插槽TF卡2 :广角 / 变焦相机分辨率8000*6000 / 4000*3000可选 ,默认12MP像素 | |
| TF卡中的视频存储格式 | 顶部插槽TF卡1:1920×1080@25fps |
| 相机插槽TF卡2 :广角 / 变焦相机分辨率1080P/4K/8K可选,默认4K@30fps | |
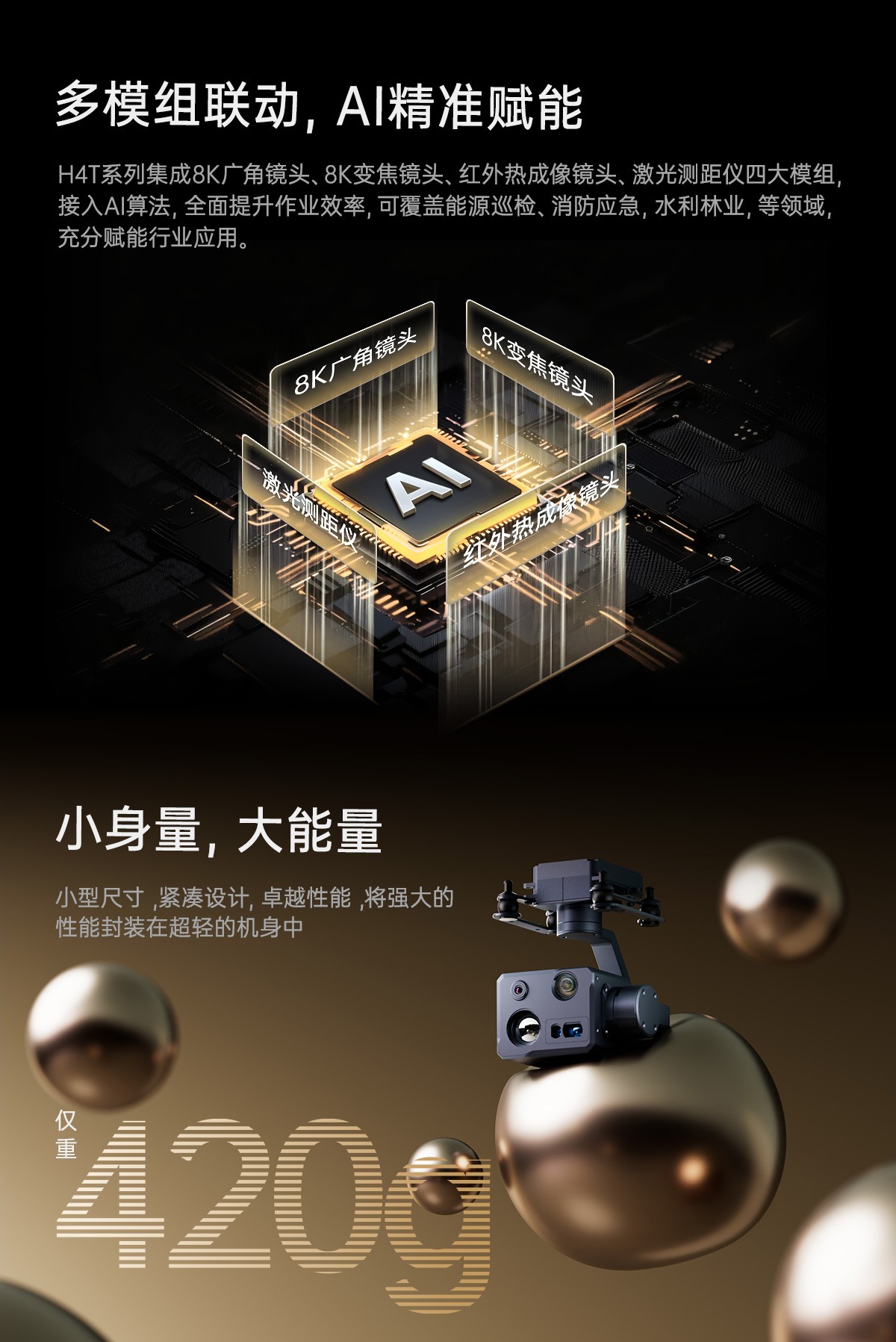
| 产品重量 | 约420g |
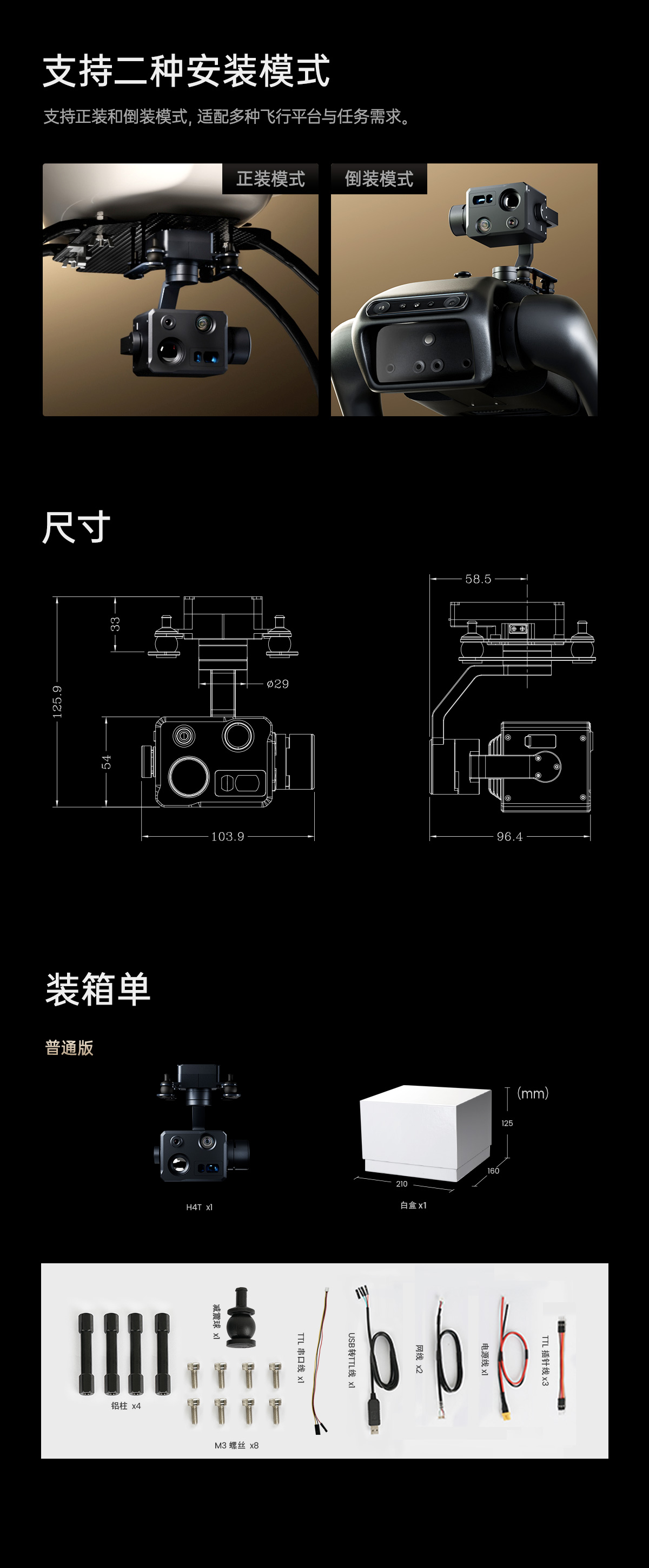
| 产品尺寸 | 102.5*97.5*124.9mm |
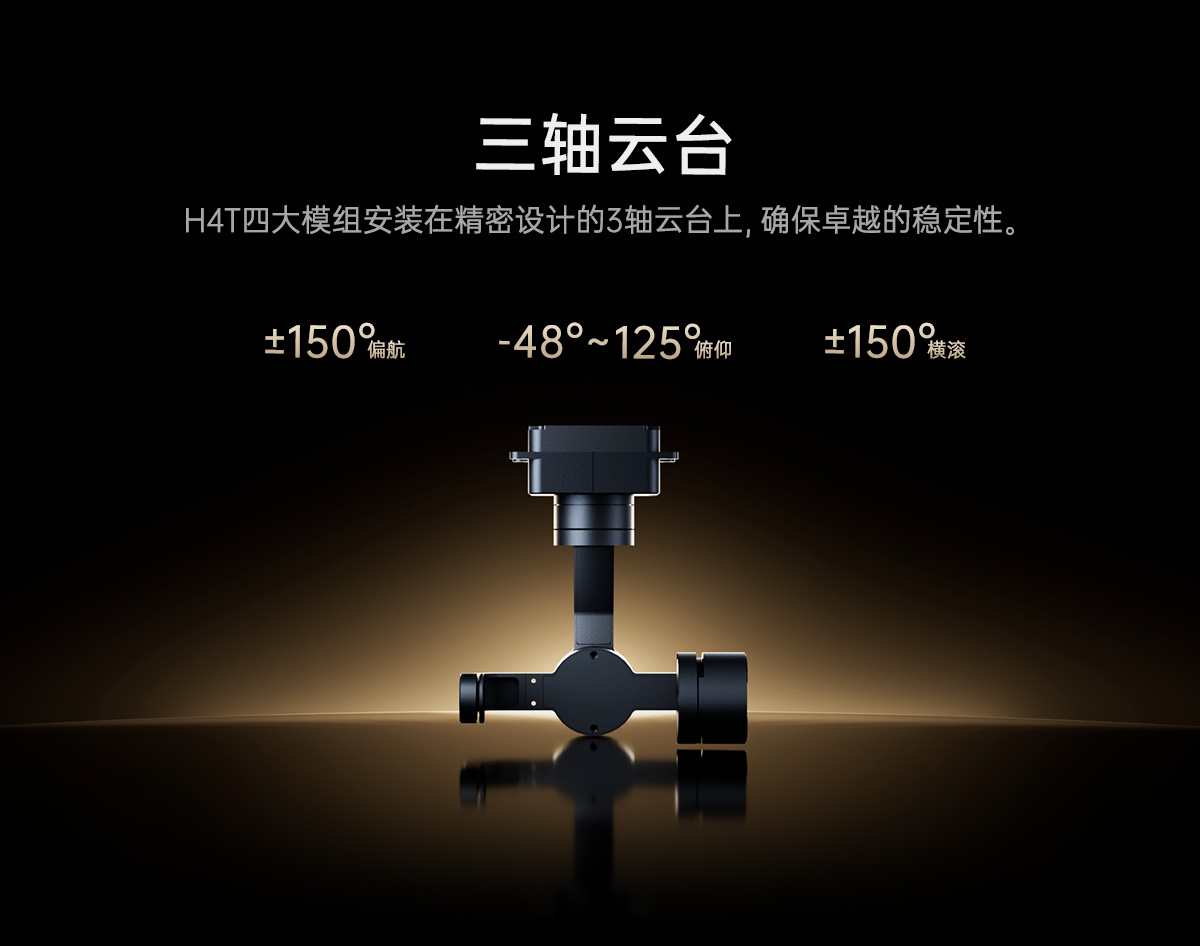
| 云台参数 | |
| 结构设计角度范围 | 俯仰角度:-65°( 上 )~135°(下), 横滚角度: ±50°, 偏航角度: ±150° |
| 软件限制角度范围 | 俯仰角度: -45°~125°, 偏航角度: ±140° |
| 角度抖动量 | 俯仰/横滚/偏航角度:±0.02° |
| 一键回中 | √ |
| 广角相机参数 | |
| 图像传感器 | 1/2 英寸CMOS(H:6.4mm, V:4.8mm, D:8.0mm) |
| 像元尺寸 | 0.80 µm (H) ×0.80 µm (V) |
| 图像素数 | 4800万像素(8000*6000) |
| EFL | 4.49mm |
| 等效焦距 | 24.29mm |
| 光圈值 | F2.8 |
| 可视角度FOV | D:84° H:70.2° V:54.9° |
| 光学畸变 | 2.50% |
| 变焦相机参数 | |
| 图像传感器 | 1/2 英寸CMOS(H:6.4mm, V:4.8mm, D:8.0mm) |
| 像元尺寸 | 0.80 µm (H) ×0.80 µm (V) |
| 图像素数 | 4800万像素(8000*6000) |
| 倍数 | 3.3x光学 |
| EFL | 15.3~49.7mm±5% |
| 等效焦距 | 82.77-268.88mm |
| 光圈值 | F3.7(W)~F4.6(T) |
| 可视角度FOV | D: 28.3°(W)~8.9°(T) H: 23.2°(W)~7.2°(T) V: 17.6°(W)~5.4°(T) |
| 光学畸变 | 1.6%(Wide)~1.4%(Tele), @∅8mm |
| 热像仪参数 | |
| 镜头焦距 | 25mm |
| 光圈值 | F1.2 |
| 水平视场角 | 17.5° |
| 垂直视场角 | 14° |
| 探测距离 (人: 1.8x0.5m) | 1042m |
| 识别距离 (人: 1.8x0.5m) | 260m |
| 验证距离 (人: 1.8x0.5m) | 130m |
| 探测距离 (车: 4.2x1.8m) | 3194m |
| 识别距离 (车: 4.2x1.8m) | 799m |
| 验证距离 (车: 4.2x1.8m) | 399m |
| 工作制式 | 非制冷长波 (8μm~14μm) |
| 探测器像素 | 640*512 |
| 像元大小 | 12μm |
| 调焦方式 | 无热化免调焦 |
| NETD(热灵敏度/噪声等效温差) | ≤50mK@F1.0 @25℃ |
| 色板 | 白热,黑热,铁红 |
| 电子变倍 | 1x ~ 8x |
| 测温功能(选配) | 测温范围:-20℃~+150℃, +100℃~+650℃ |
| 测温精度:±3℃或者读数的±3%,取最大值 | |
| 跟踪性能参数 | |
| 偏差像素更新速率 | 30Hz |
| 偏差像素输出延迟 | <30ms |
| 最小目标对比度 | 5% |
| 最小信噪比 | 4 |
| 最小目标尺寸 | 16*16 像素 |
| 最大目标尺寸 | 256*256 像素 |
| 跟踪速度 | 48 像素/帧 |
| 目标记忆时间 | 100场 |
| 识别性能参数 | |
| 类型 | 人、车 |
| 同时能检测的数量 | ≥ 10 个目标 |
| 对比度 | ≥ 5% |
| 最小目标尺寸 | 5×5 像素 |
| 车辆检测概率 | ≥85% |
| 虚警率 | ≤10% |
| 测距性能参数 | |
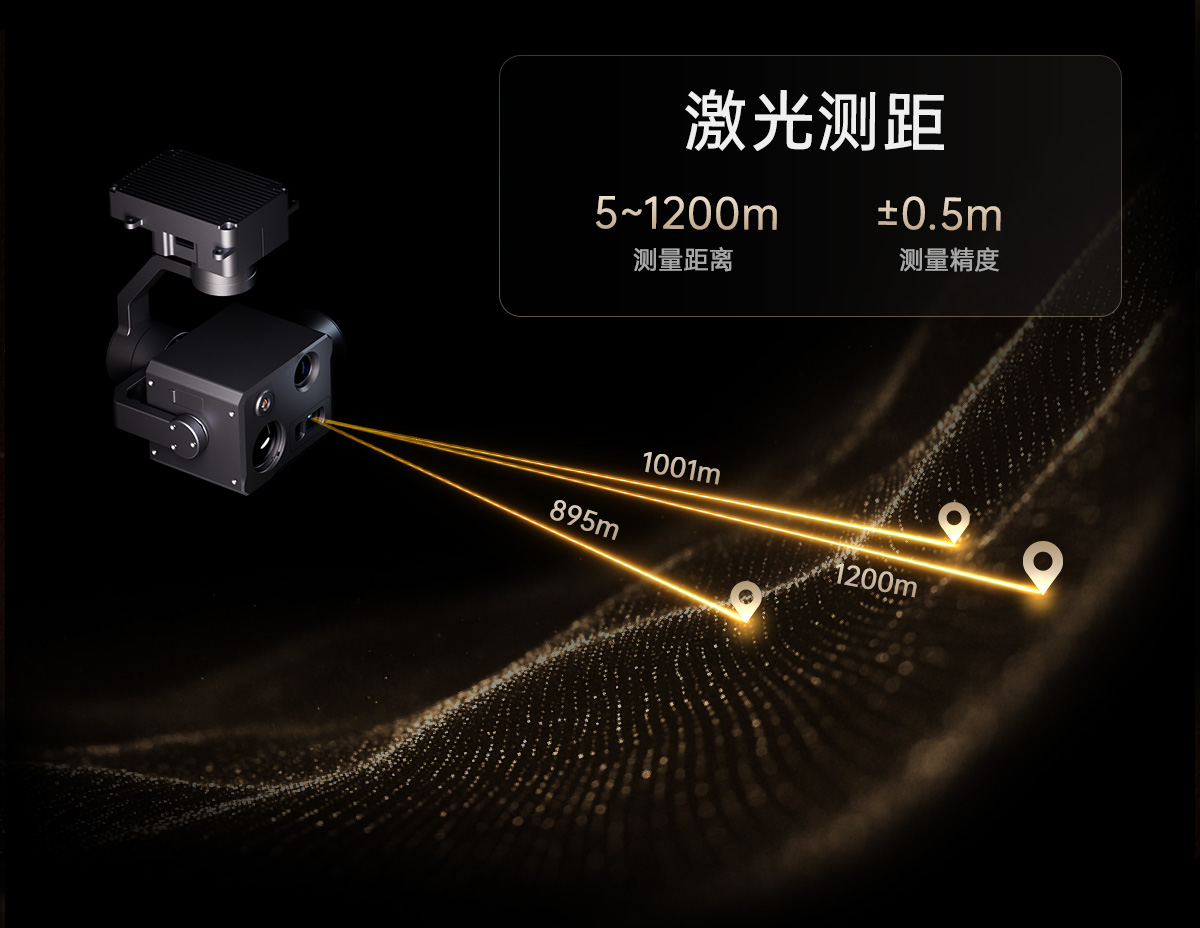
| 有效距离 | 5~1200 米 |
| 误差精度 | 1米 |
| 光束 | 905nm 脉冲激光 |
| 发散角 | ~6 mrad |
| 激光脉冲频率 | 0.1--4Hz |
| 安全等级 | Class1 |
| 位置解析 | 目标的经纬度 |
| 测量 | 测量出画面中心位置物体到激光仪的两点距离 |
| 特色功能 | |
| OSD | 显示或者隐藏(云台航向/俯仰角度,倍数,测距值,TF卡状态,飞机GPS及海拔高度,目标点GPS及海拔高度,日期时间) |
| 照片属性(POS) | 支持拍摄时间和GPS坐标 |
| 网络读卡 | HTTP读取照片,下载视频 |
| KLV(UDP) | 支持卡录或者Viewlink视频播放 |
| ArduPilot / PX4 | 支持(Mavlink协议控制) 选配:支持ArduPilot Follow me功能 |
| 画面显示 | EO+IR /IR+EO /EO /IR |
| 双路视频流输出(选配) | 支持(一路EO输出,一路IR输出,开启后不支持录制视频) |
姓名:品灵电子
电话:
邮箱:3432704529@qq.com
地址:中国广东深圳市
版权所有 © 2025 品灵电子 (www.szpinling.com)All Rights Reserved.











